Robot Stihl/Viking 632C - Perte du signal du fil périmétrique
Publié : lun. juil. 29, 2024 3:44 pm
Bonjour à tous. J'ouvre ce post car je tente de réparer un robot 632C qui a un problème avec la détection du fil périmétrique. Au delà de réparer mon robot, j'espère que cela pourra également aider d'autres personnes qui ont un problème similaire. Je mets toutes les infos dans ce post en espérant que ça attirera quelques curieux pour m'aider.
Etat :
- Robot toujours HS - pas de détection du signal du fil périmétrique
TODO :
- Je bloque - Need help - Cf. plus bas. Idéalement, si un membre possède un robot fonctionnel et une prise domotique de mesure de puissance ou un oscillo...
- Cf. plus bas. Idéalement, si un membre possède un robot fonctionnel et une prise domotique de mesure de puissance ou un oscillo...
- vérification station de base
- Refaire un tour sur l'interface de débug avec l'activation du code revendeur (1er test sans le code revendeur => NOK) ou de controle manuel
- Problème de dimensionnement du cable périmétrique ?
Avancement :
- Vérification du signal de la base : Il y'a un signal mais est-il Ok ? => analyse en cours
- Contrôle visuel de la carte de la station de base : Ok
- Changement de la carte de réception du robot => Mieux sur 1 des 2 signaux 'OUT'
Contrôle du signal de la base
Configuration de test :
Une petite boucle de 3mx3m avec ~50m de cable au sol (le reste est en vrac un peu plus loin) et une résistance en série. Le tout fait 13 Ohm de mémoire.
Je mesure 3 Ohm sur les 13 Ohm.
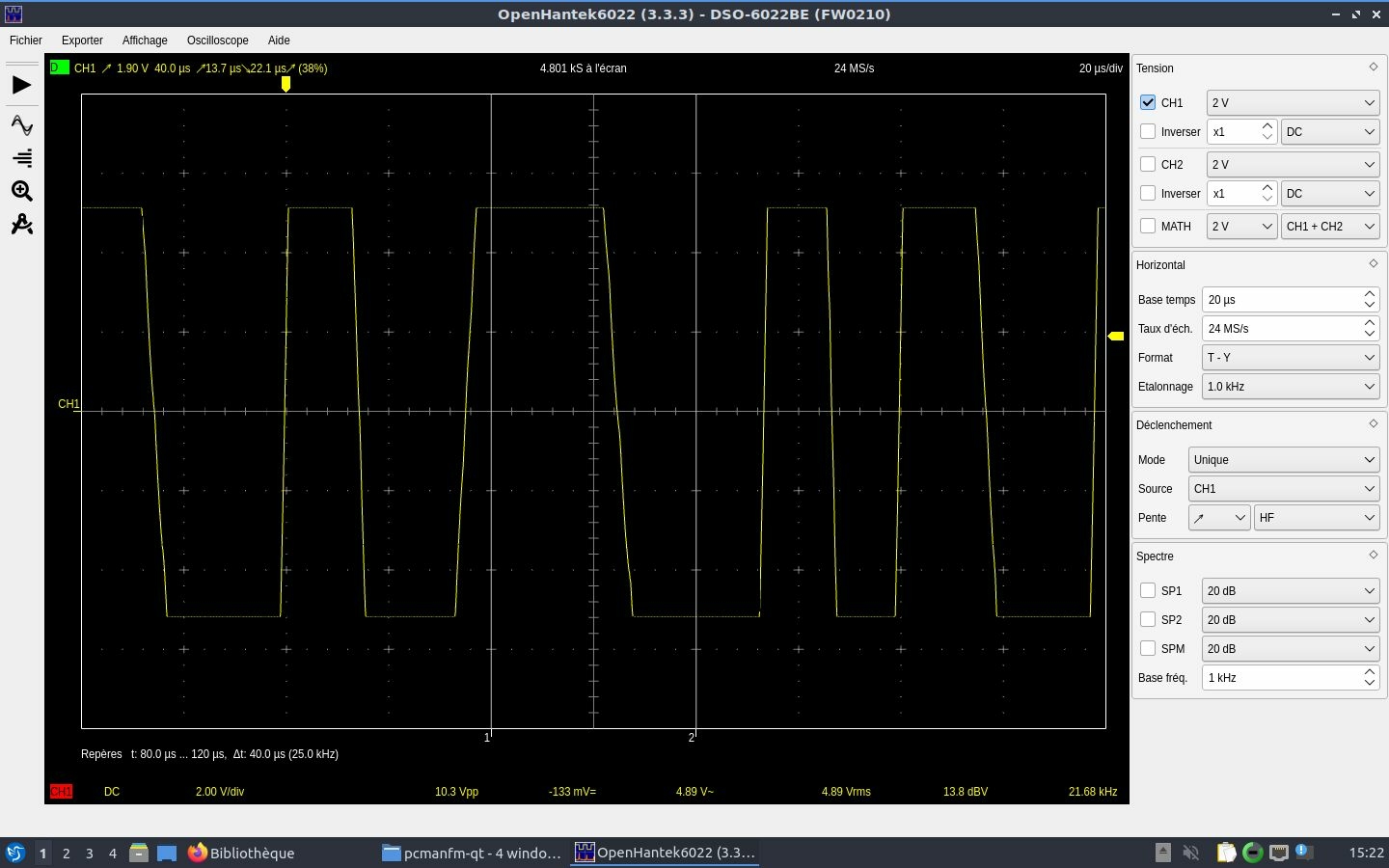
Captures lorsque le robot n'est pas connecté à la base :
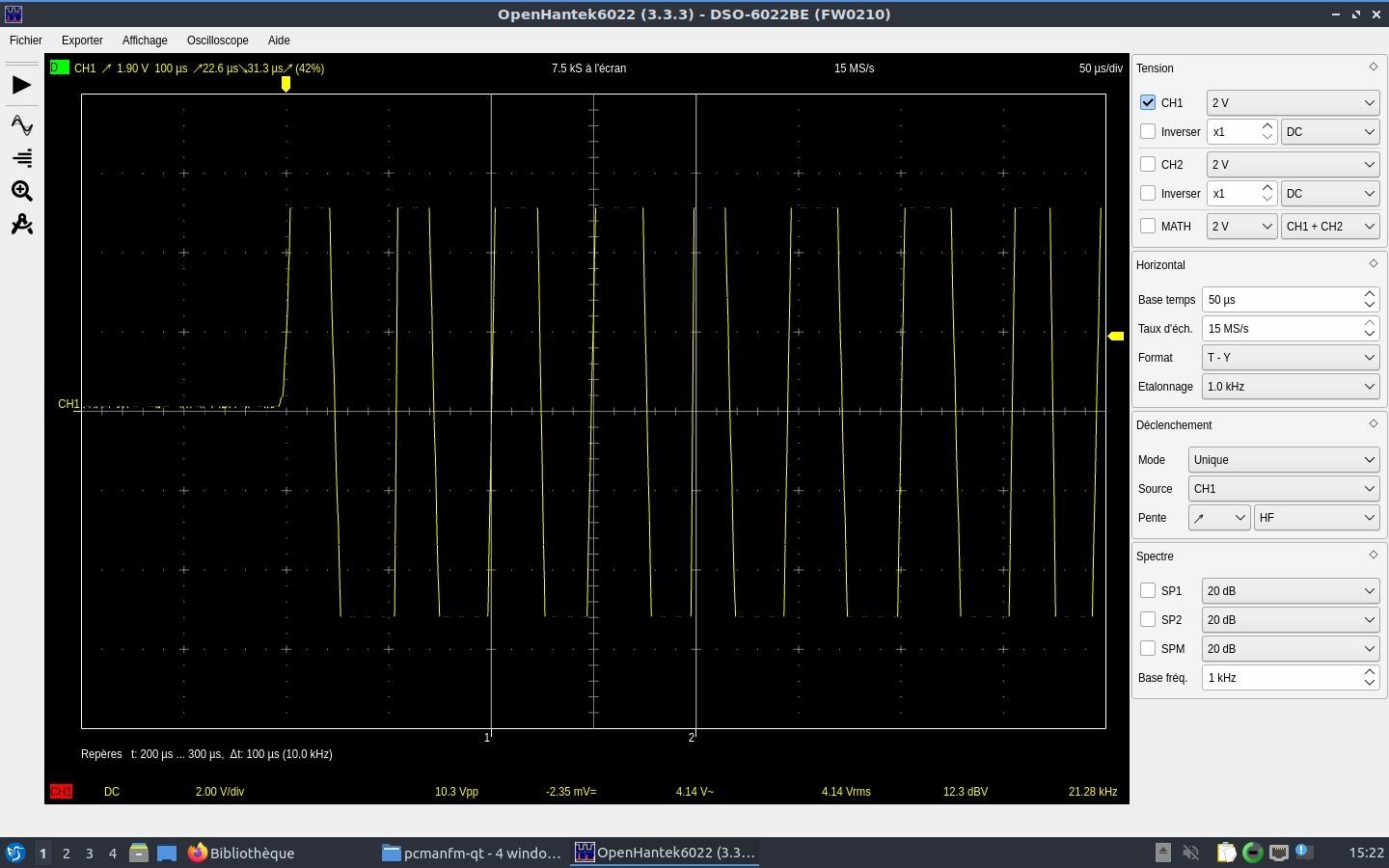
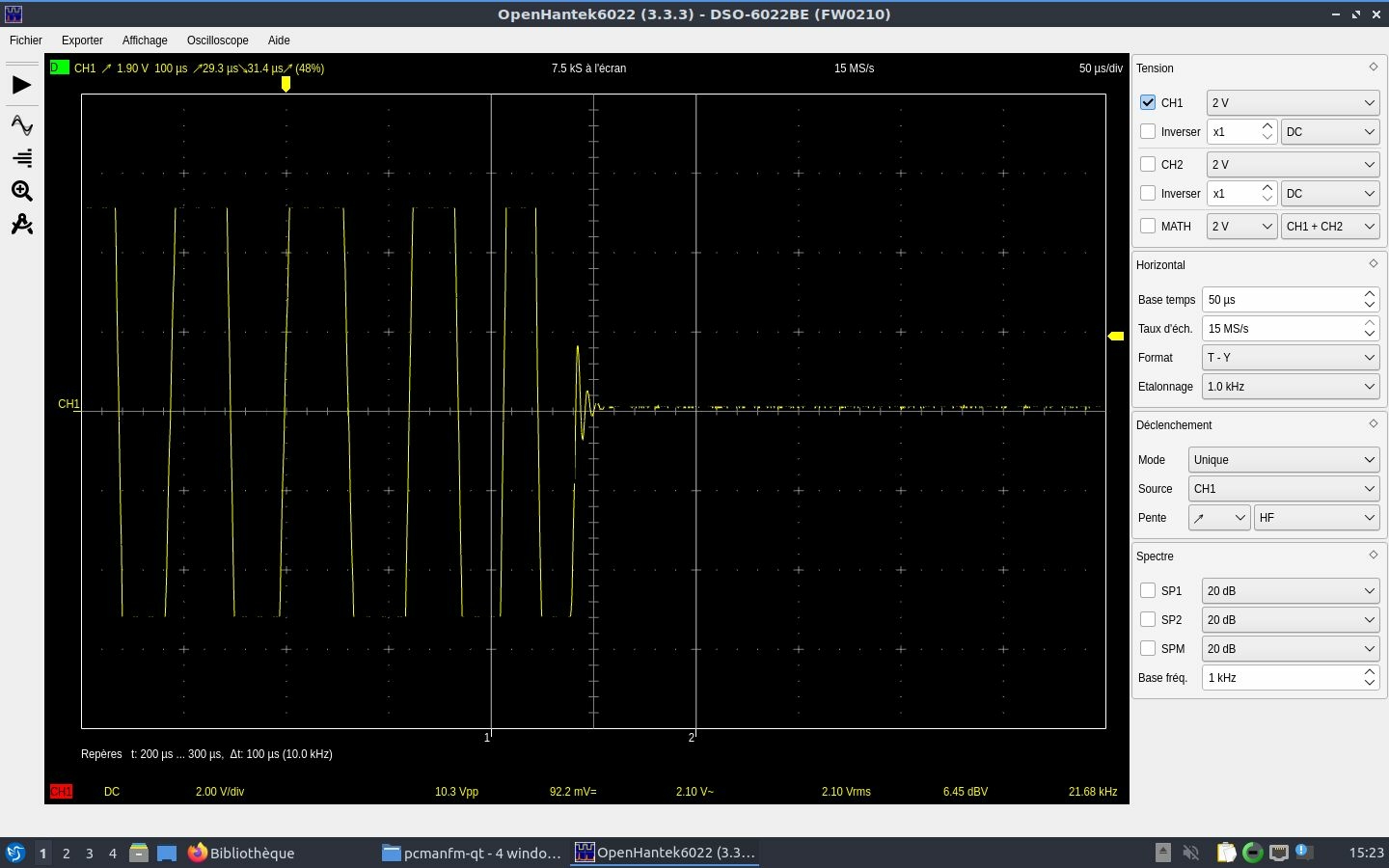
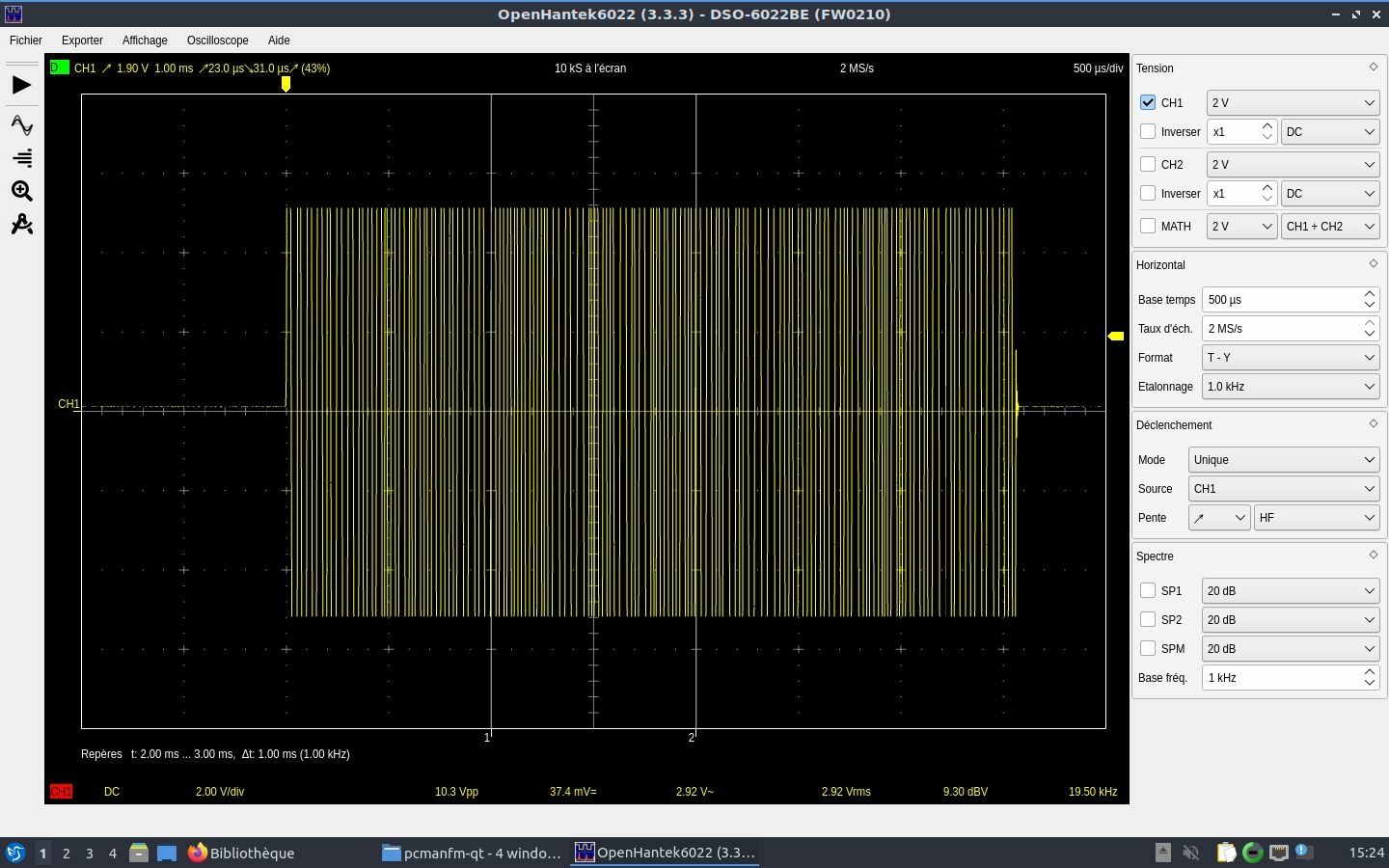
Captures lorsque le robot est connecté à la base :
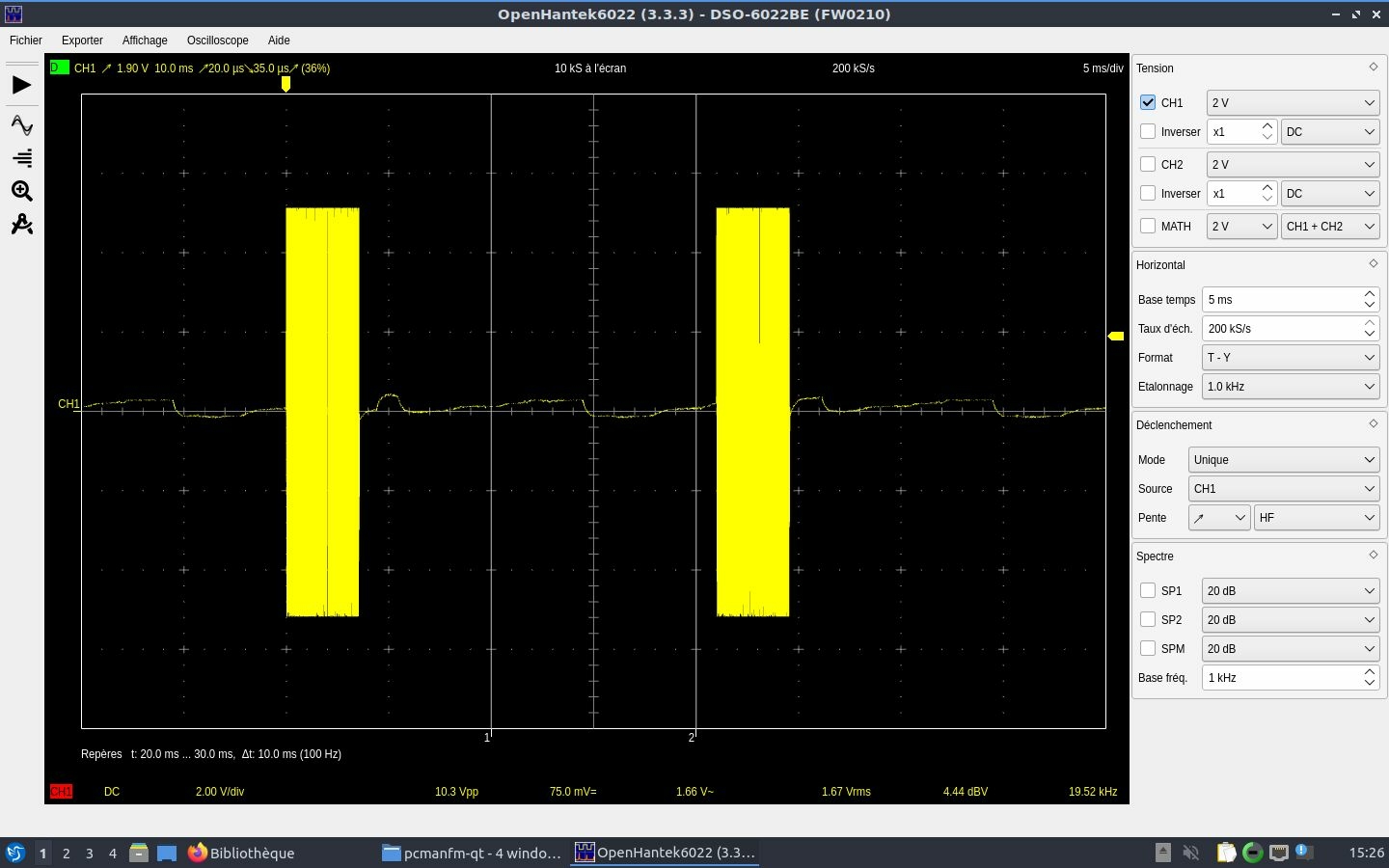
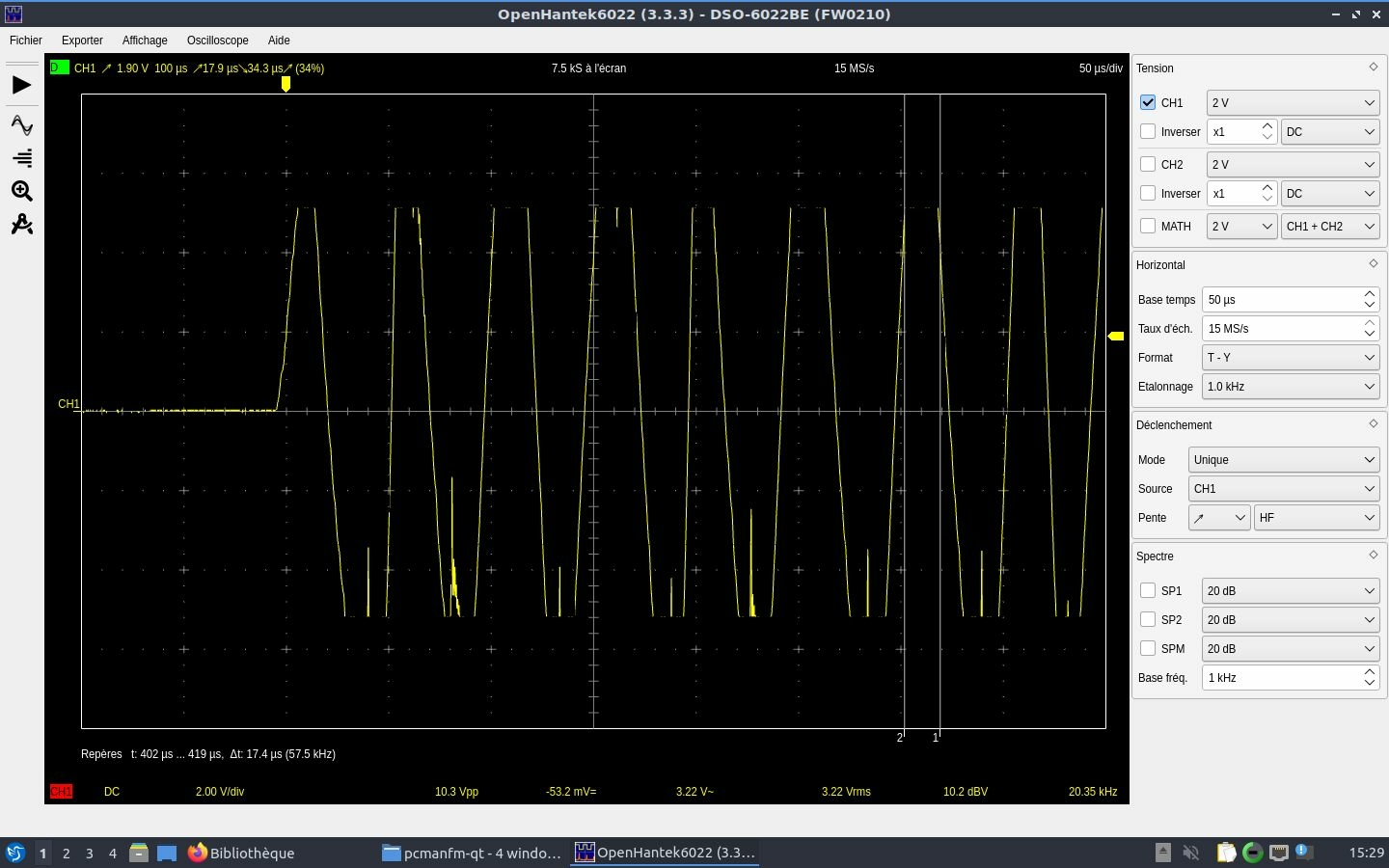
J'ai l'impression que le signal est pas mal. En tous cas il y'a un signal... Qq défauts quand le robot est connecté à la base et en charge. Dans tous les cas (connecté ou non), le robot ne détecte pas le signal.
Votre avis ? Si qqun peut faire un test équivalent sur sa base, cela permettrait d'avoir une référence.
Robot en mode 'revendeur' - Panneau signal
Lorsque je vais dans la partie revendeur du robot, j'obtiens qq chose du genre :
Parfois ça monte à 1700/2000. Mais les champs 'état' et 'mode' sont toujours vides.
Votre avis ? Si qqun peut faire un test équivalent sur son robot, cela permettrait d'avoir une référence.
Démontage de la carte de réception dans le robot
Depuis, j'ai remplacé la carte de réception car celle que j'avais était HS. Mais je mets mes analyses, ça peut toujours aider.
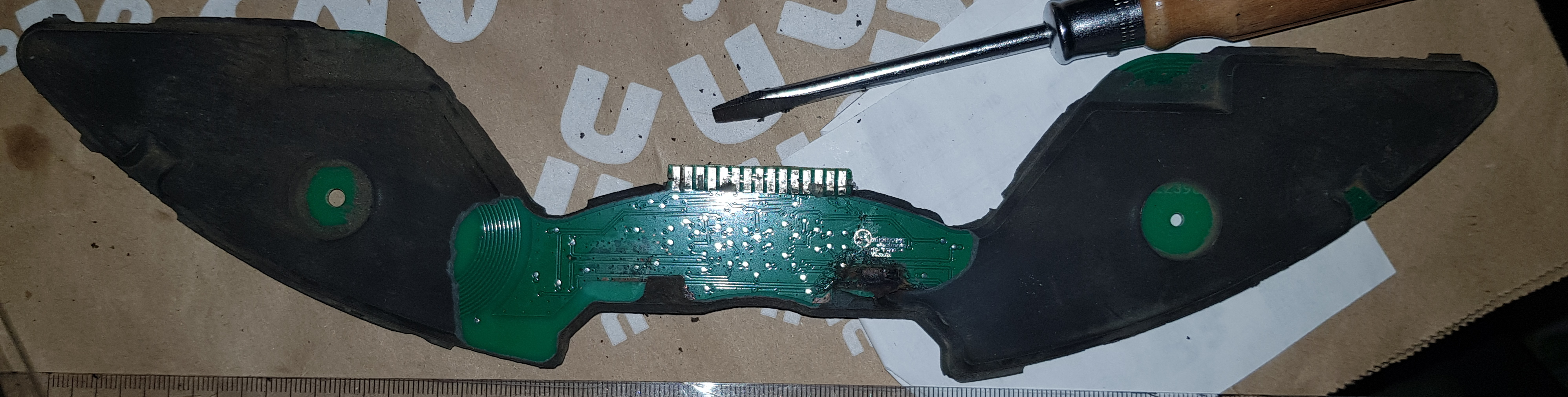
Lorsque j'ai récupéré la robot, la carte de réception ne semblait pas dans un bon état. La protection en silicone s'enlevait facilement.

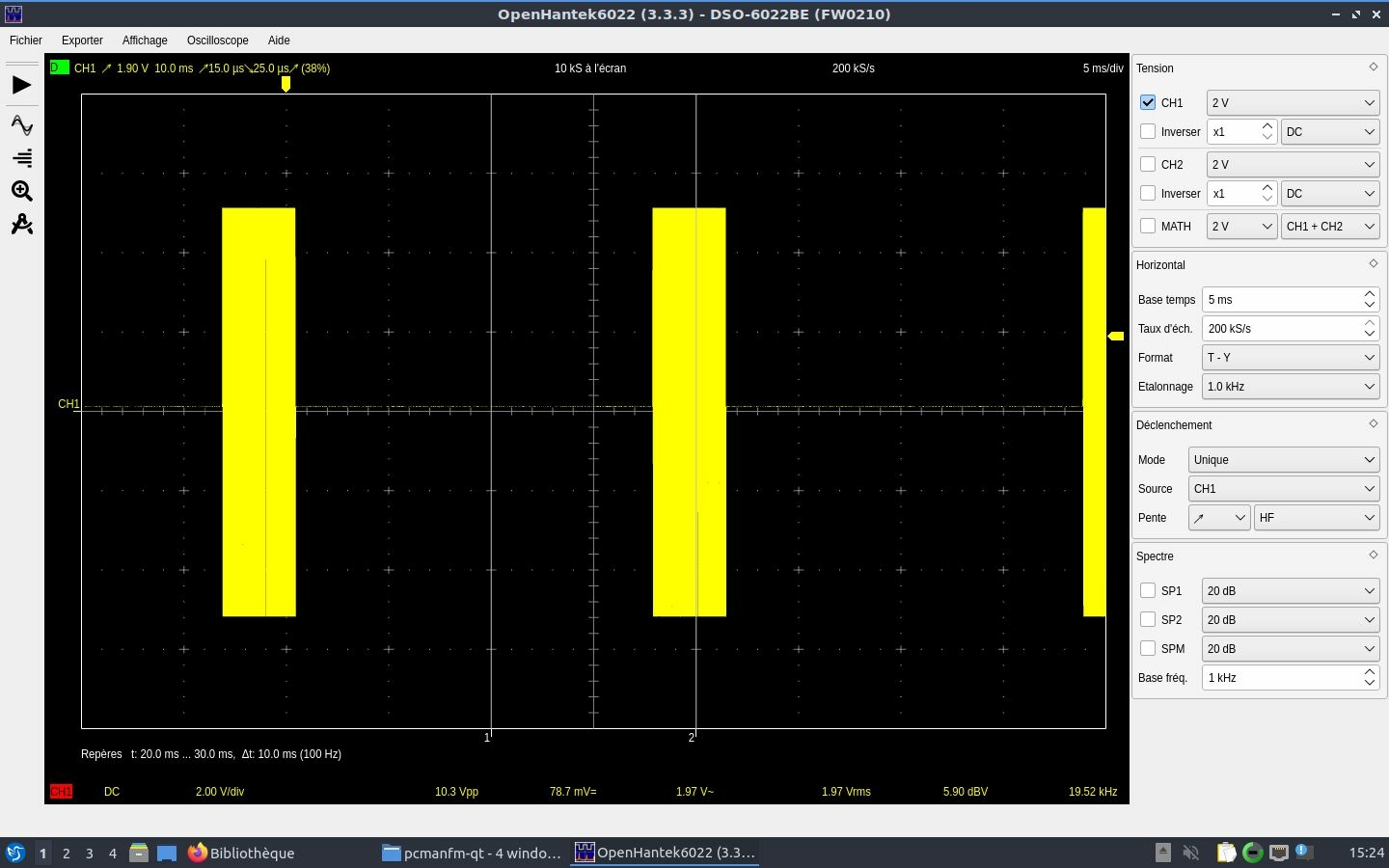
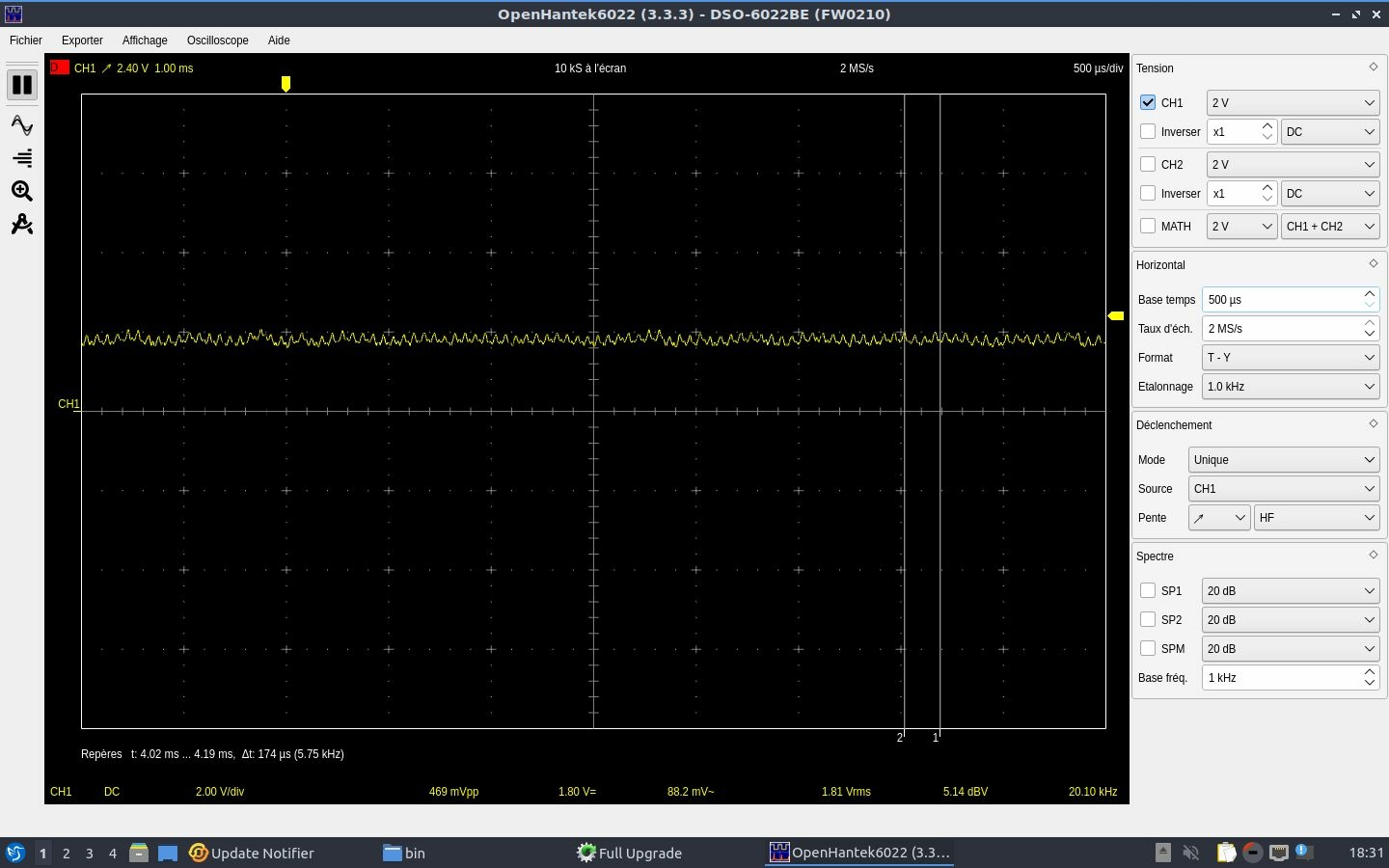
Signal outA, avec signal périmétrique actif - Cette voie (A) était HS :
Signal outA, avec signal périmétrique inactif :
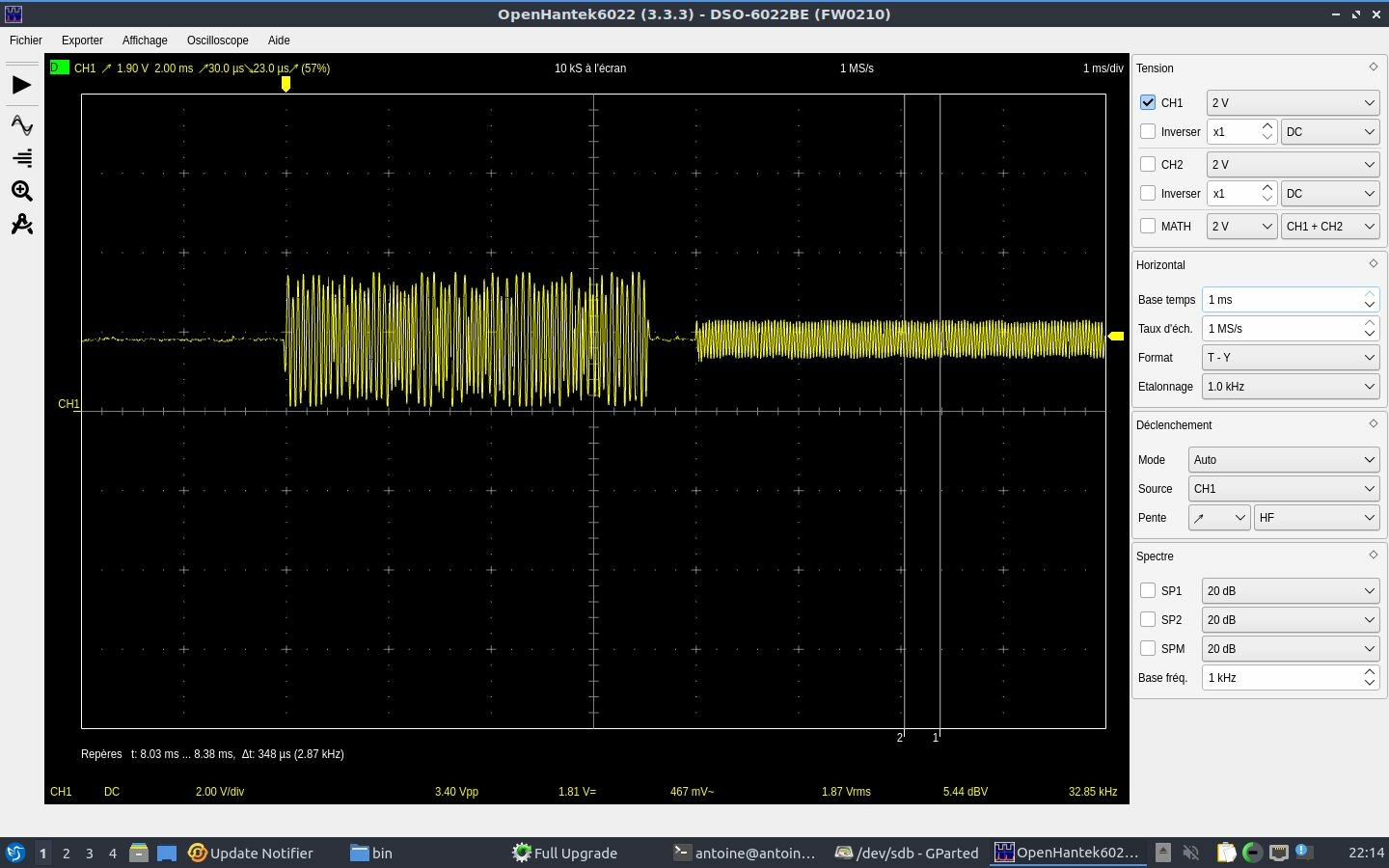
Signal outB, avec signal périmétrique actif - Cette voie (B) était OK :
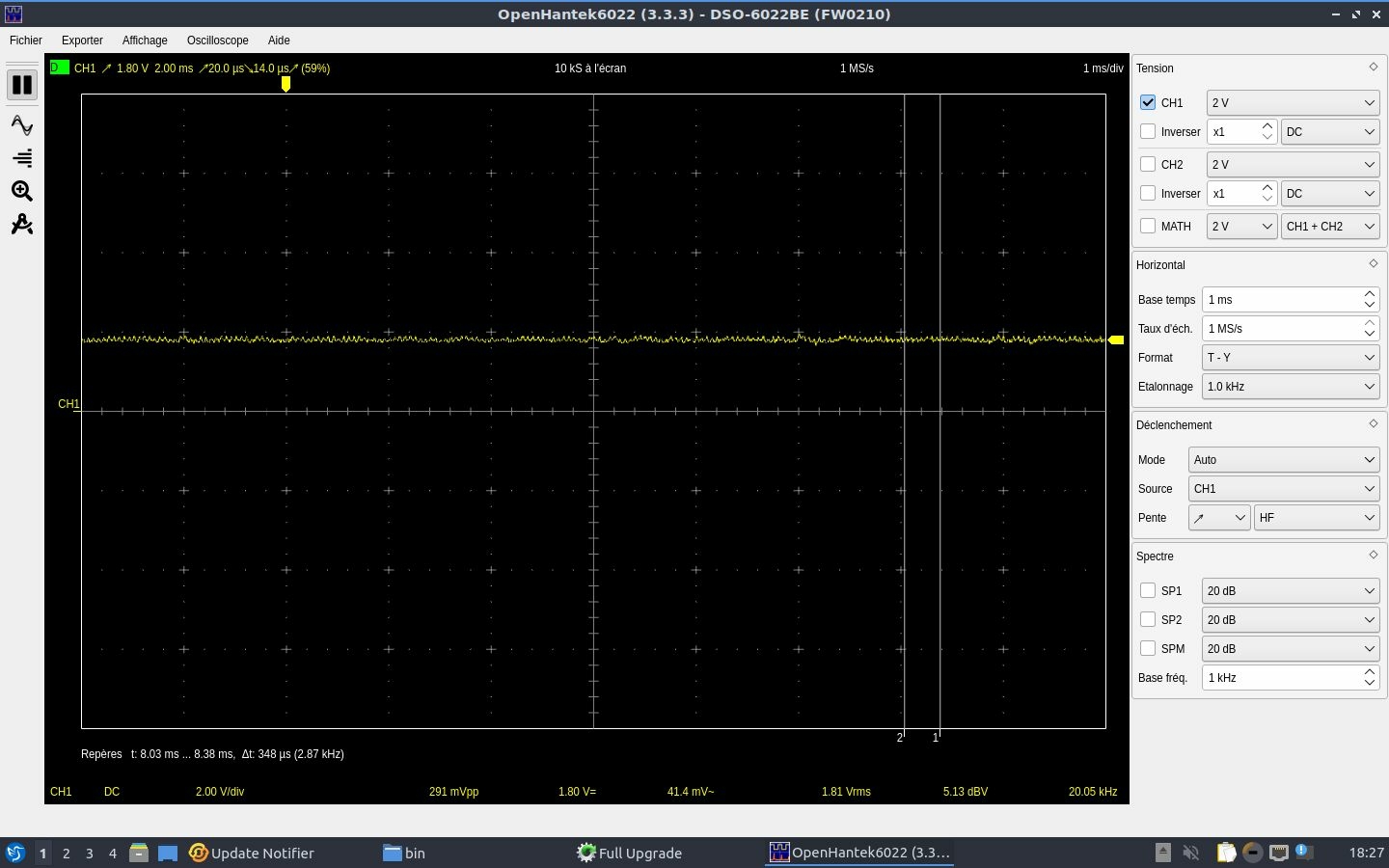
Signal outA, avec signal périmétrique inactif :
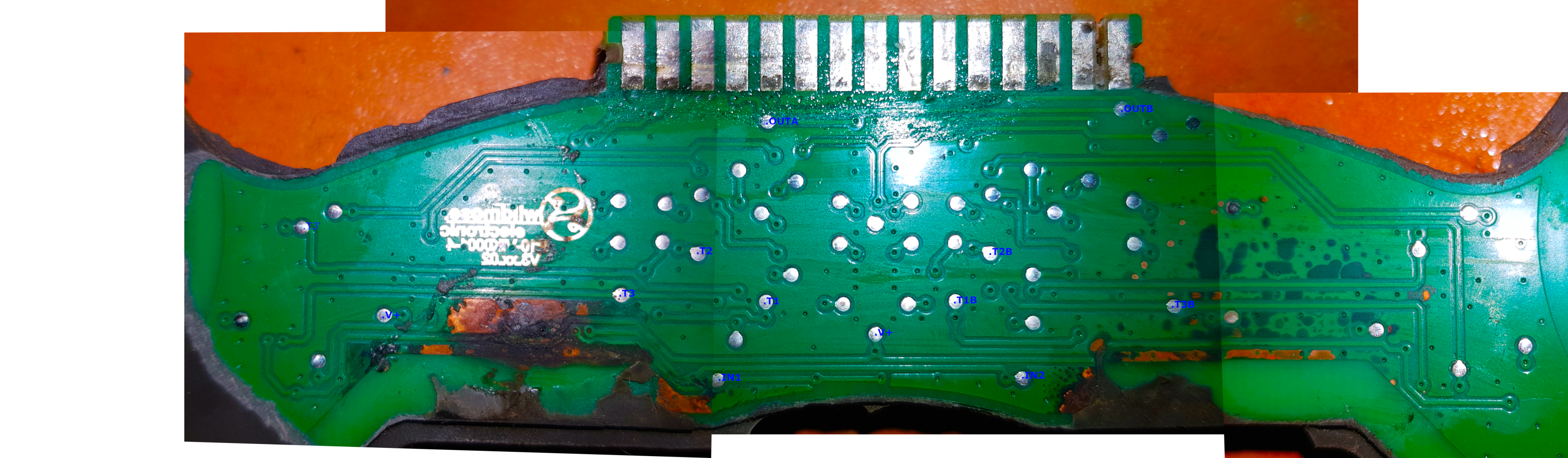
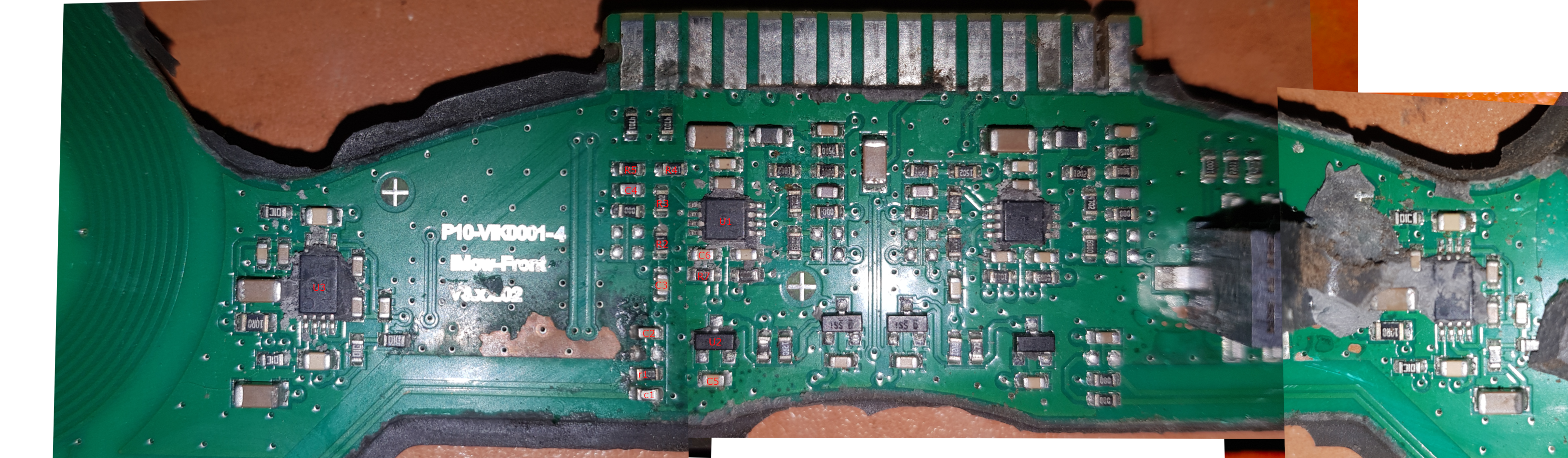
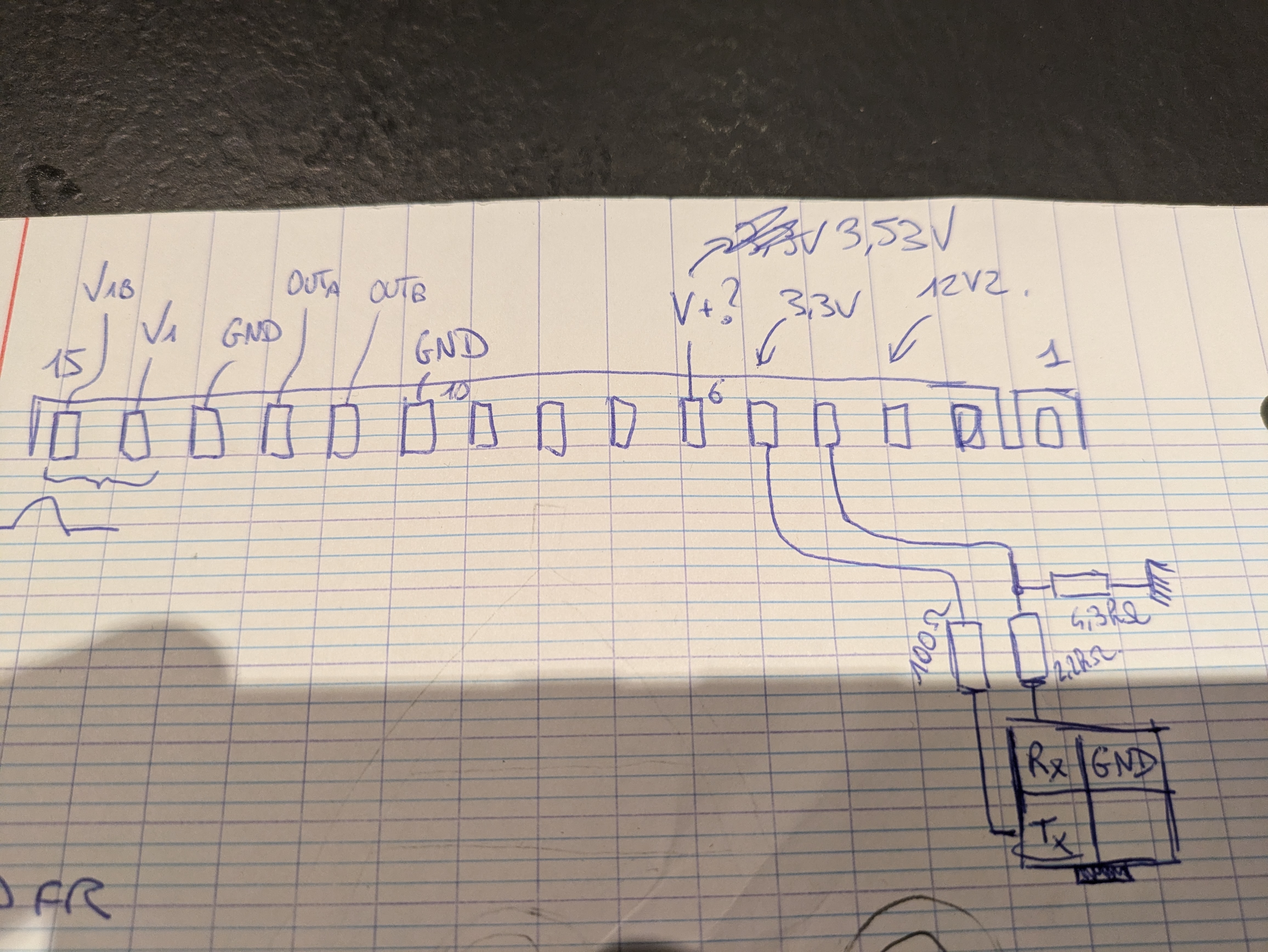
Pinout et schéma supposés :
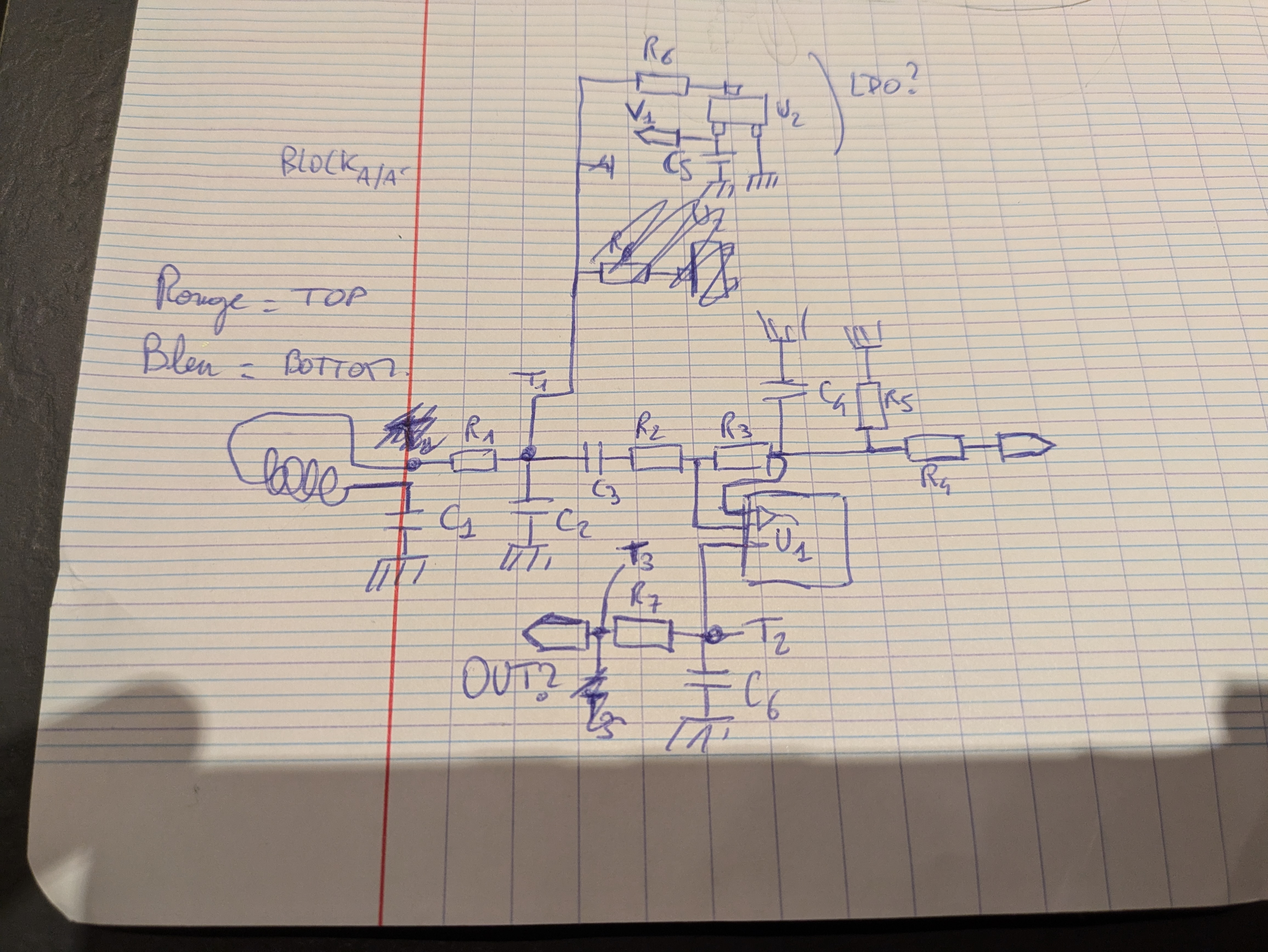
Bon, visiblement la carte ne supporte pas bien l'humidité. J'ai l'impression que l'humidité arrive sous le silicone et ne peut pas s'échapper. Résultat : le vernis est attaqué et ensuite le cuivre s'oxyde. Ma carte était HS car il y'avait un court circuit entre le signal d'alimentation (V+) et la masse. Visiblement ça a bien cramé. J'ai gratté la zone noircie et coupé la piste et fait un fix avec un cable. Mais cela n'a pas suffit, la tension T1 est nulle. Je pense que le petit LDO est HS.
Comme l'opportunité s'est présentée, j'ai préféré remplacer la carte. Et sur la nouvelle, les 2 signaux out sont comme le signal outB.
Inspection de la station de base
En désespoir de cause (Et par curiosité), j'ai démonté la station de base.



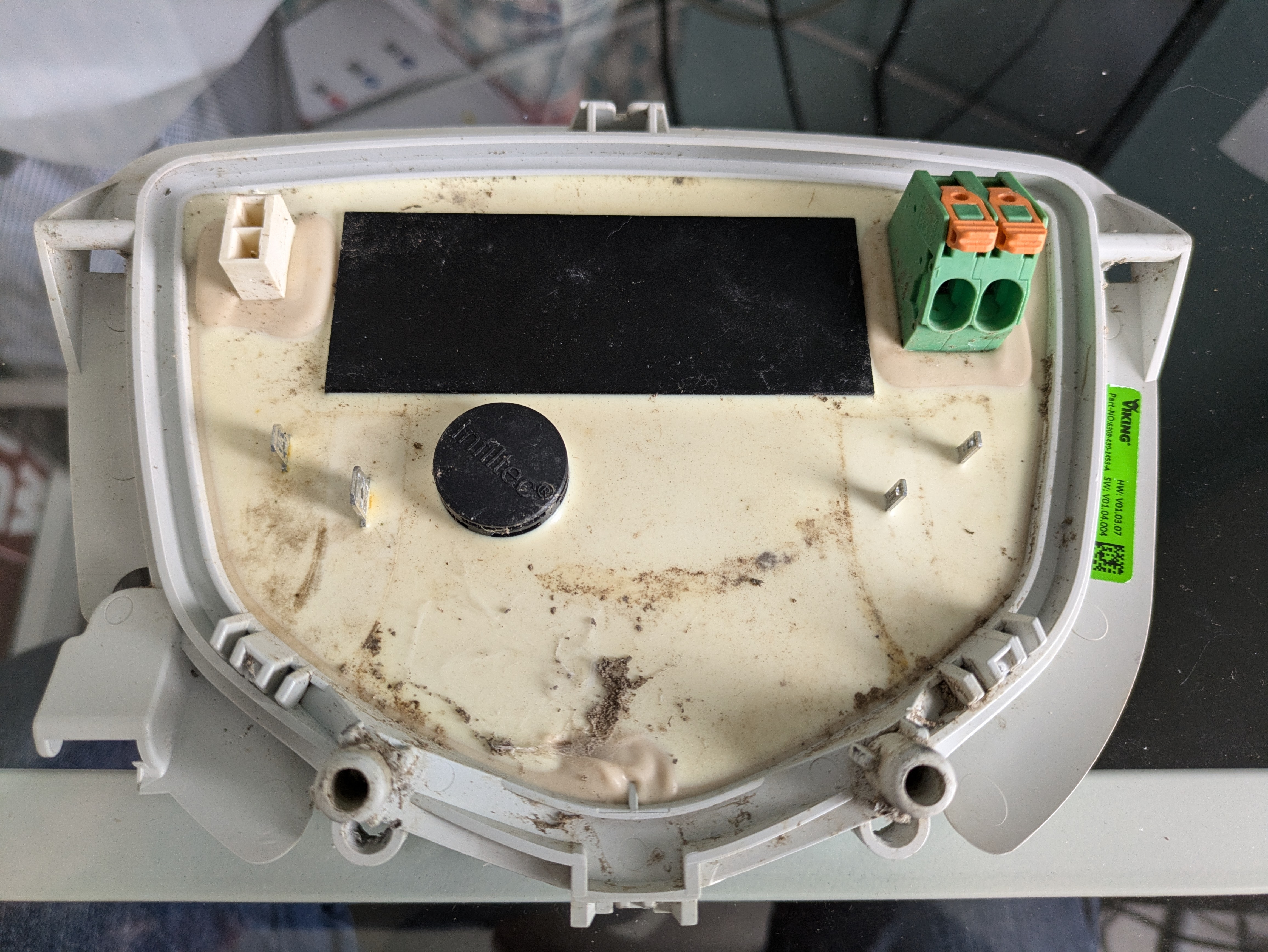
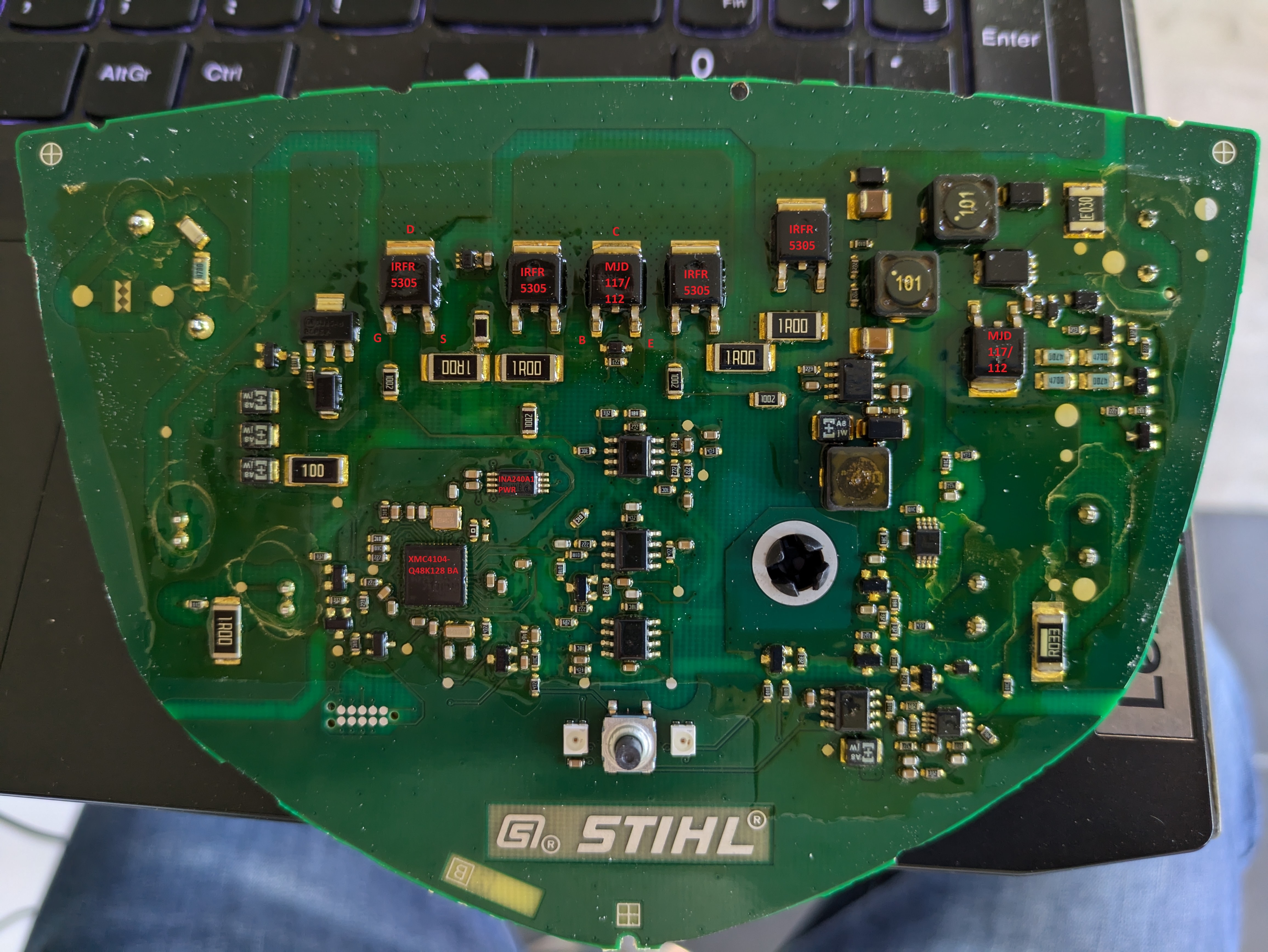
Je vous passe le temps que j'y ai passé. Mais la carte parait en bon état. Aucune marque sur les composants, enfin si vous voyez qqchose, n'hésitez pas.
Par contre, j'ai une question : La toute première fois que j'ai branché la station, elle était assez chaude. Actuellement, elle ne l'est plus du tout. Niveau conso :
- <1W quand je branche l'alimentation seule.
- entre 2-3W quand la base est alimentée mais que le fil périmétrique n'est pas relié - LED rouge clignotante
- 4W quand la base est alimentée avec le fil périmétrique fermé - LED rouge fixe
- Robot connecté à la base et en charge, je prends +29W (de mémoire, je n'ai pas refais le test aujourd'hui)
Ce qui me surprend, c'est d'avoir un signal mais de consommer uniquement 4W. D'autant plus que l'alimentation fait quasiment 120W !!
Si qqun possède un modèle équivalent et une prise domotique, je veux bien des mesures comparatives.
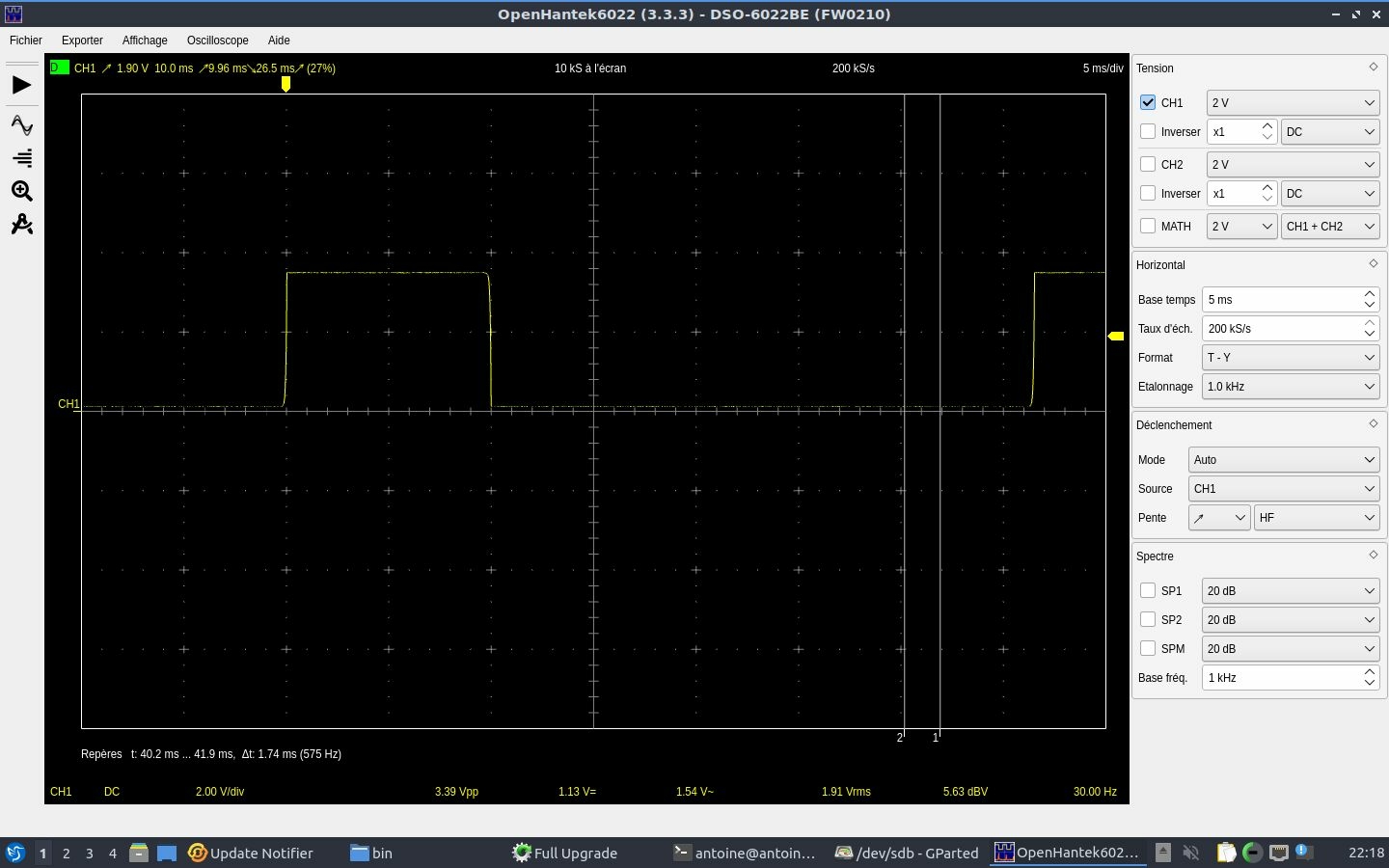
Je me suis intéressé de plus près a cette station qui ne consomme pas beaucoup. J'ai fait quelques mesures complémentaires au niveau du circuit de puissance. Sur les 4 transistors identiques IFR5305, au niveau de la Gate et de la Source : j'obtiens le signal suivant :
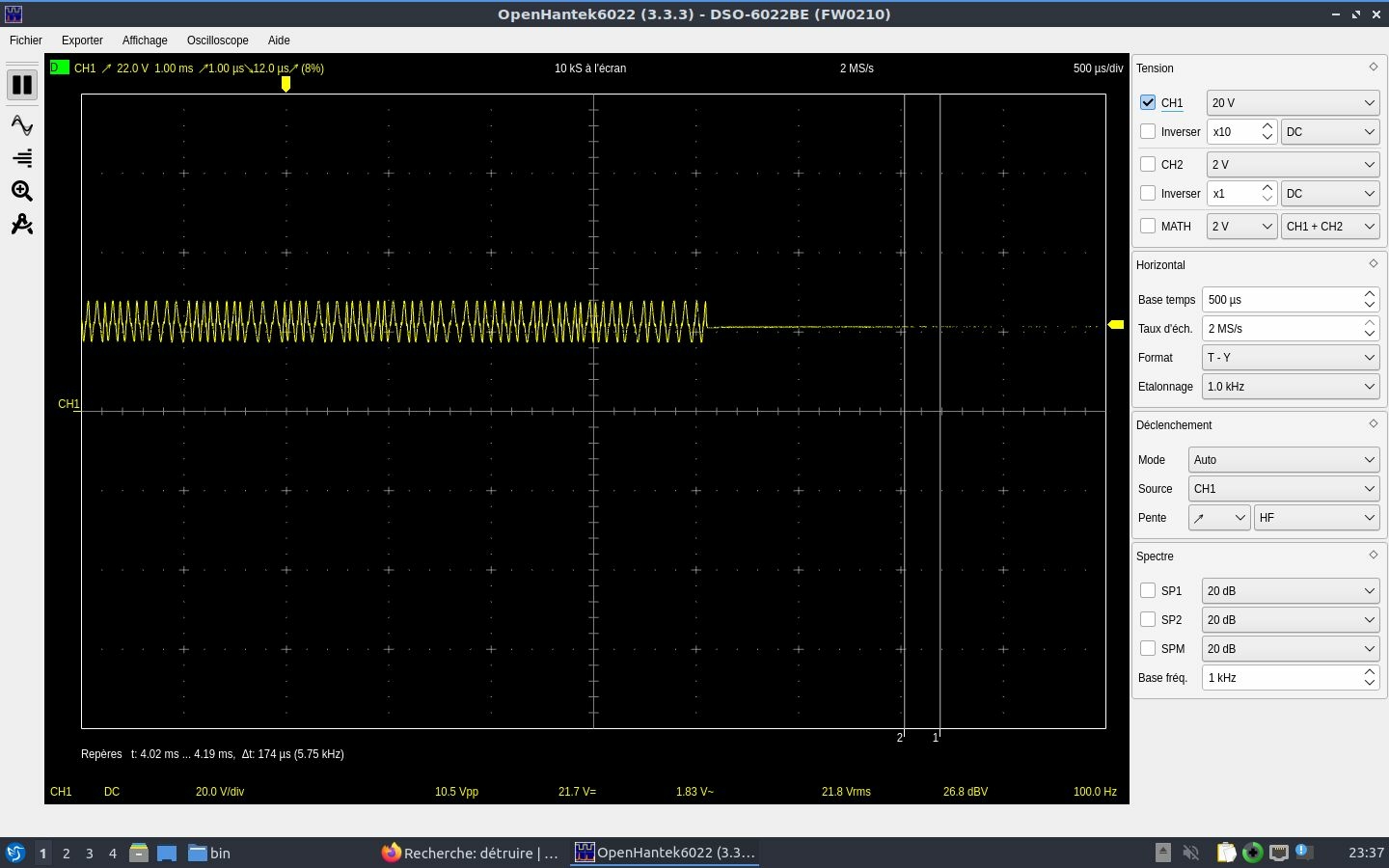
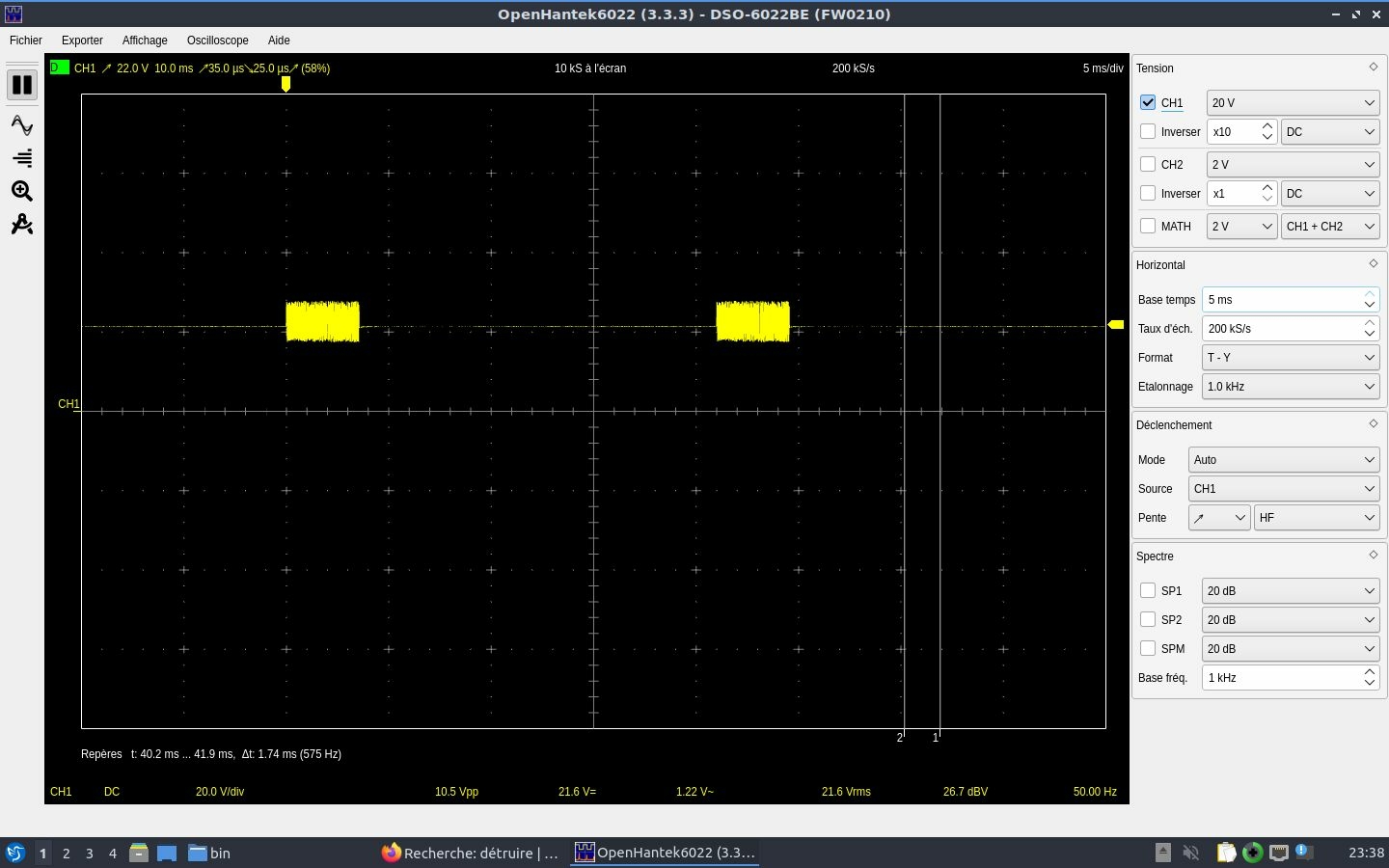
Ce qui me surprend, c'est d'avoir un signal de 40V sur la Gate alors que je m'attends à avoir un signal de type contrôle basé sur du 5V. Si mes mesures sont bonnes, cela signifie que le micro se prend du 40V sur les I/Os.
Au niveau du transistor MJD, j'ai également un signal surprenant au niveau de la base :
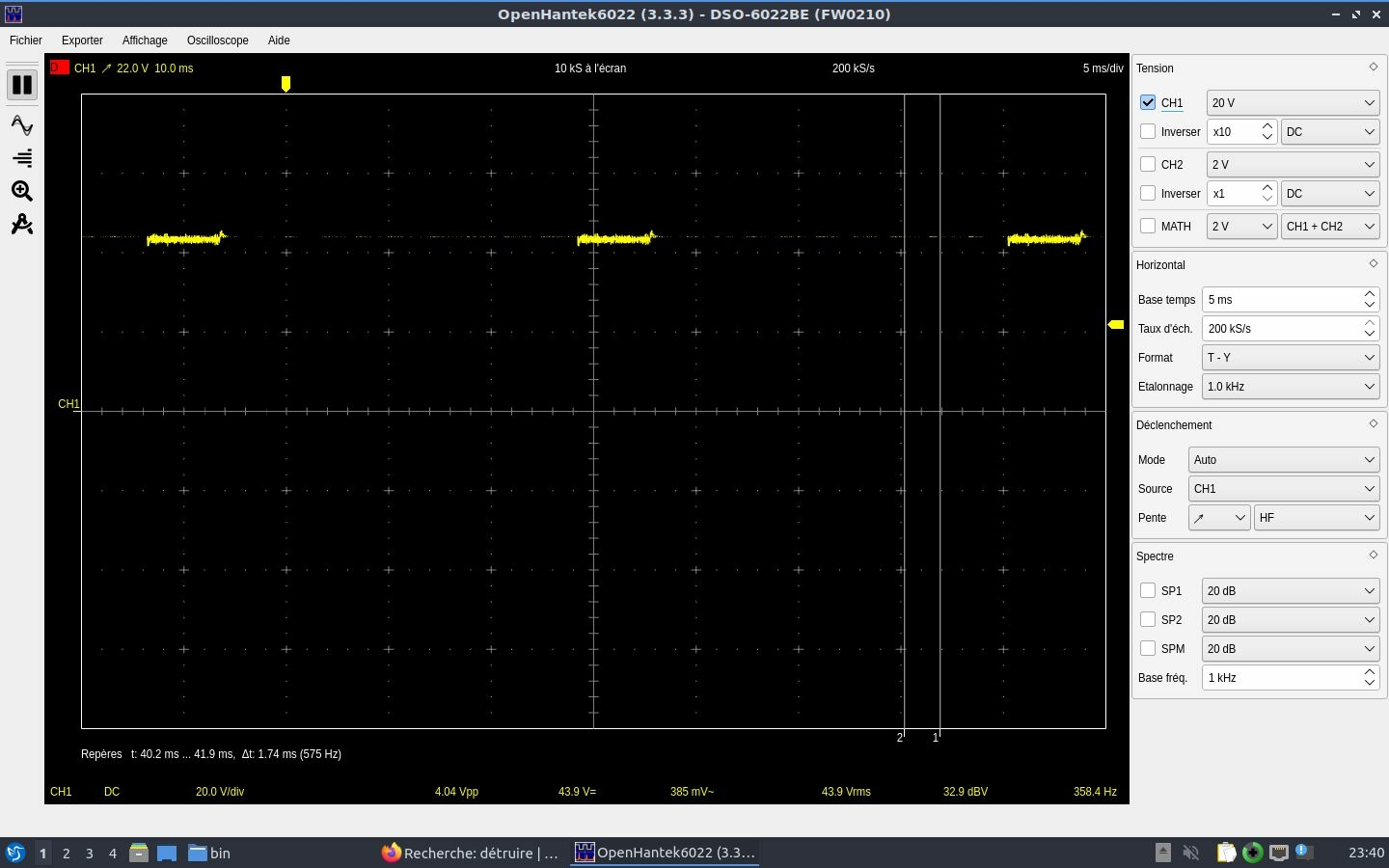
Qu'en pensez-vous ? Ca craint les 40V sur le micro proc.
Je m'interroge sur mes circuit de test : quelques mètres de fil et une résistance de 10ohm en série. Est ce que ce circuit ne poserait pas problème par sa faible inductance ?
Enfin, il n'y a pas de signal sur le circuit secondaire ( le fil blanc sous la station ). Est ce normal ?
... To be continued...
Etat :
- Robot toujours HS - pas de détection du signal du fil périmétrique
TODO :
- Je bloque - Need help
- vérification station de base
- Refaire un tour sur l'interface de débug avec l'activation du code revendeur (1er test sans le code revendeur => NOK) ou de controle manuel
- Problème de dimensionnement du cable périmétrique ?
Avancement :
- Vérification du signal de la base : Il y'a un signal mais est-il Ok ? => analyse en cours
- Contrôle visuel de la carte de la station de base : Ok
- Changement de la carte de réception du robot => Mieux sur 1 des 2 signaux 'OUT'
Contrôle du signal de la base
Configuration de test :
Une petite boucle de 3mx3m avec ~50m de cable au sol (le reste est en vrac un peu plus loin) et une résistance en série. Le tout fait 13 Ohm de mémoire.
Je mesure 3 Ohm sur les 13 Ohm.
Captures lorsque le robot n'est pas connecté à la base :
Captures lorsque le robot est connecté à la base :
J'ai l'impression que le signal est pas mal. En tous cas il y'a un signal... Qq défauts quand le robot est connecté à la base et en charge. Dans tous les cas (connecté ou non), le robot ne détecte pas le signal.
Votre avis ? Si qqun peut faire un test équivalent sur sa base, cela permettrait d'avoir une référence.
Robot en mode 'revendeur' - Panneau signal
Lorsque je vais dans la partie revendeur du robot, j'obtiens qq chose du genre :
Parfois ça monte à 1700/2000. Mais les champs 'état' et 'mode' sont toujours vides.
Votre avis ? Si qqun peut faire un test équivalent sur son robot, cela permettrait d'avoir une référence.
Démontage de la carte de réception dans le robot
Depuis, j'ai remplacé la carte de réception car celle que j'avais était HS. Mais je mets mes analyses, ça peut toujours aider.
Lorsque j'ai récupéré la robot, la carte de réception ne semblait pas dans un bon état. La protection en silicone s'enlevait facilement.
Signal outA, avec signal périmétrique actif - Cette voie (A) était HS :
Signal outA, avec signal périmétrique inactif :
Signal outB, avec signal périmétrique actif - Cette voie (B) était OK :
Signal outA, avec signal périmétrique inactif :
Pinout et schéma supposés :
Bon, visiblement la carte ne supporte pas bien l'humidité. J'ai l'impression que l'humidité arrive sous le silicone et ne peut pas s'échapper. Résultat : le vernis est attaqué et ensuite le cuivre s'oxyde. Ma carte était HS car il y'avait un court circuit entre le signal d'alimentation (V+) et la masse. Visiblement ça a bien cramé. J'ai gratté la zone noircie et coupé la piste et fait un fix avec un cable. Mais cela n'a pas suffit, la tension T1 est nulle. Je pense que le petit LDO est HS.
Comme l'opportunité s'est présentée, j'ai préféré remplacer la carte. Et sur la nouvelle, les 2 signaux out sont comme le signal outB.
Inspection de la station de base
En désespoir de cause (Et par curiosité), j'ai démonté la station de base.
Je vous passe le temps que j'y ai passé. Mais la carte parait en bon état. Aucune marque sur les composants, enfin si vous voyez qqchose, n'hésitez pas.
Par contre, j'ai une question : La toute première fois que j'ai branché la station, elle était assez chaude. Actuellement, elle ne l'est plus du tout. Niveau conso :
- <1W quand je branche l'alimentation seule.
- entre 2-3W quand la base est alimentée mais que le fil périmétrique n'est pas relié - LED rouge clignotante
- 4W quand la base est alimentée avec le fil périmétrique fermé - LED rouge fixe
- Robot connecté à la base et en charge, je prends +29W (de mémoire, je n'ai pas refais le test aujourd'hui)
Ce qui me surprend, c'est d'avoir un signal mais de consommer uniquement 4W. D'autant plus que l'alimentation fait quasiment 120W !!
Si qqun possède un modèle équivalent et une prise domotique, je veux bien des mesures comparatives.
Je me suis intéressé de plus près a cette station qui ne consomme pas beaucoup. J'ai fait quelques mesures complémentaires au niveau du circuit de puissance. Sur les 4 transistors identiques IFR5305, au niveau de la Gate et de la Source : j'obtiens le signal suivant :
Ce qui me surprend, c'est d'avoir un signal de 40V sur la Gate alors que je m'attends à avoir un signal de type contrôle basé sur du 5V. Si mes mesures sont bonnes, cela signifie que le micro se prend du 40V sur les I/Os.
Au niveau du transistor MJD, j'ai également un signal surprenant au niveau de la base :
Qu'en pensez-vous ? Ca craint les 40V sur le micro proc.
Je m'interroge sur mes circuit de test : quelques mètres de fil et une résistance de 10ohm en série. Est ce que ce circuit ne poserait pas problème par sa faible inductance ?
Enfin, il n'y a pas de signal sur le circuit secondaire ( le fil blanc sous la station ). Est ce normal ?
... To be continued...