Le robot, peut-il rejoindre tout seul une autre zone en empruntant un chemin pavé ?
Publié : lun. févr. 08, 2021 11:31 am
En standard, le robot va perdre du temps à « tondre » les pavés. En plus il subira le piège du long couloir (voir FAQ Automower). Si le chemin pavé est également emprunté par des voitures, le va-et vient du robot risque également qu'il se fasse écraser. Il existe une solution: Robonect, avec son module de gestion des passages (en dur) par des barrières virtuelles:
Le principe en est tout simple : tant que le robot suit son guide, le module ouvre le passage, ce qui permet au robot d’accéder à l’autre partie sans zigzags. Dès qu’il quitte le guide, il commence à tondre, ce qui ferme le passage et le robot reste dans sa zone fermée. Quand il a fini de tondre, il arrête le moteur de coupe et cherche son guide. Dès lors, le module Robonect ouvre de nouveau le passage pour que le robot puisse retrouver sa base.
https://www.robonect-shop.de/2019/06/27 ... steuerung/
Traduction :
« Si la pelouse est répartie sur plusieurs zones reliées par un passage, vous pouvez utiliser le module Robonect Hx pour éviter toute entrée accidentelle dans le passage et pour veiller à ce que les différentes zones soient tondues de manière ciblée.
Pour cela, il faut le module Robonect Hx (qui permet de commander le robot à partir d’un PC ou smartphone, et le relais WLAN également disponible sur le site Robonect »
Ce dispositif permet donc d’éviter que le robot ne traverse les allées plus souvent que nécessaire. En plus,le robot ne sera jamais en mode de tonte quand il traverse une allée (ce qui diminue fortement la perte d’herbe sur ces allées/terrasses).
Autre avantage : il ne s’épuisera pas dans le couloir étroit.
Coût total des modules : environ 200€ :
https://www.robonect-shop.de/shop/robonect-hx/
Attention, il y a un module spécifique pour chaque robot supporté!
Relais pour la gestion des passages :
https://www.robonect-shop.de/shop/mult ... onsrelais/
Voici le schéma des fils :
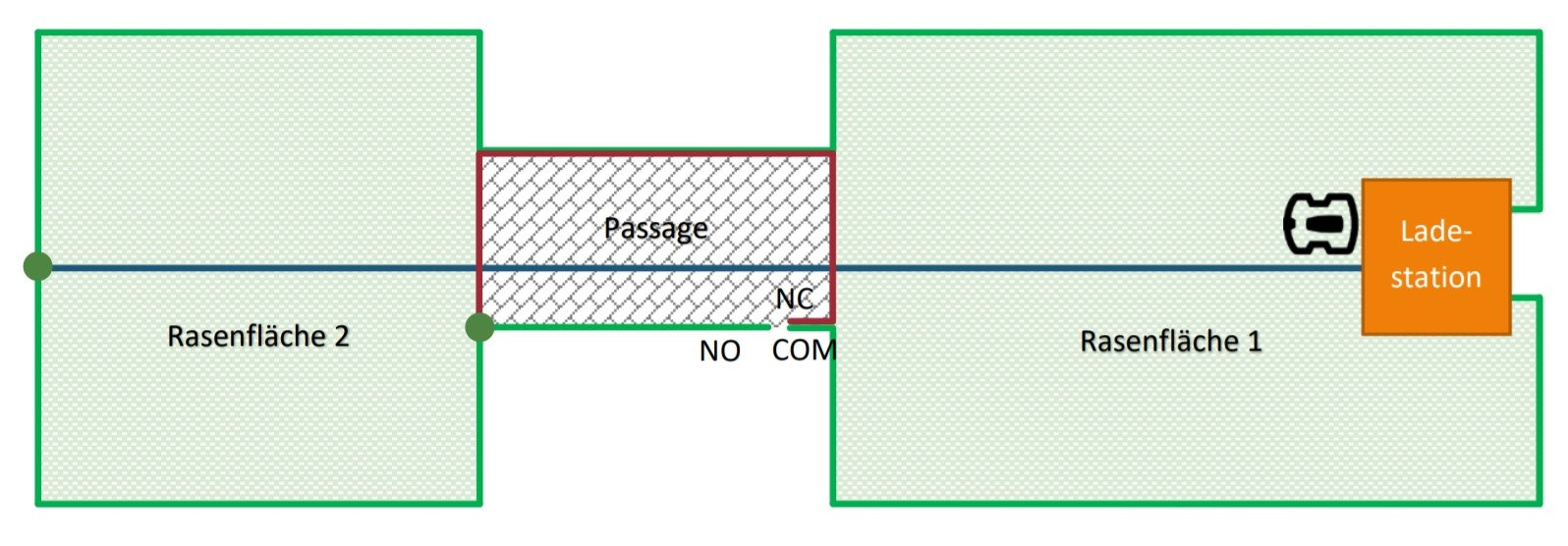
Razenfläche 1 représente la pelouse principale où se trouve la base.
Le fil vert est le périphérique
Le fil bleu est le guide
Le fil rouge sert à complètement fermer le passage et n’est actif que quand le robot tond
Quand le robot suit son guide (moteur de tonte coupé) le passage est grand ouvert, ce qui permet au robot de se rendre dans la pelouse secondaire (Razenfläche 2) et de revenir quand la batterie doit être chargée. NC, NO et Com sont les trois contacts du relais qui ouvre et ferme automatiquement le passage (en fait un relais est simplement un interrupteur qui est activé par électronique plutôt que manuellement). Quand il n’est pas activé, le relais relie le contact Com (commun) au NC (Normally closed) et quand il est activé, il relie le contact Com au NO (Normally open).
Ce principe ne marche que si on a un guide qui traverse le passage et demande qu’on utilise le guide pour envoyer le robot dans la partie derrière le passage.
Le principe en est tout simple : tant que le robot suit son guide, le module ouvre le passage, ce qui permet au robot d’accéder à l’autre partie sans zigzags. Dès qu’il quitte le guide, il commence à tondre, ce qui ferme le passage et le robot reste dans sa zone fermée. Quand il a fini de tondre, il arrête le moteur de coupe et cherche son guide. Dès lors, le module Robonect ouvre de nouveau le passage pour que le robot puisse retrouver sa base.
https://www.robonect-shop.de/2019/06/27 ... steuerung/
Traduction :
« Si la pelouse est répartie sur plusieurs zones reliées par un passage, vous pouvez utiliser le module Robonect Hx pour éviter toute entrée accidentelle dans le passage et pour veiller à ce que les différentes zones soient tondues de manière ciblée.
Pour cela, il faut le module Robonect Hx (qui permet de commander le robot à partir d’un PC ou smartphone, et le relais WLAN également disponible sur le site Robonect »
Ce dispositif permet donc d’éviter que le robot ne traverse les allées plus souvent que nécessaire. En plus,le robot ne sera jamais en mode de tonte quand il traverse une allée (ce qui diminue fortement la perte d’herbe sur ces allées/terrasses).
Autre avantage : il ne s’épuisera pas dans le couloir étroit.
Coût total des modules : environ 200€ :
https://www.robonect-shop.de/shop/robonect-hx/
Attention, il y a un module spécifique pour chaque robot supporté!
Relais pour la gestion des passages :
https://www.robonect-shop.de/shop/mult ... onsrelais/
Voici le schéma des fils :

Razenfläche 1 représente la pelouse principale où se trouve la base.
Le fil vert est le périphérique
Le fil bleu est le guide
Le fil rouge sert à complètement fermer le passage et n’est actif que quand le robot tond
Quand le robot suit son guide (moteur de tonte coupé) le passage est grand ouvert, ce qui permet au robot de se rendre dans la pelouse secondaire (Razenfläche 2) et de revenir quand la batterie doit être chargée. NC, NO et Com sont les trois contacts du relais qui ouvre et ferme automatiquement le passage (en fait un relais est simplement un interrupteur qui est activé par électronique plutôt que manuellement). Quand il n’est pas activé, le relais relie le contact Com (commun) au NC (Normally closed) et quand il est activé, il relie le contact Com au NO (Normally open).
Ce principe ne marche que si on a un guide qui traverse le passage et demande qu’on utilise le guide pour envoyer le robot dans la partie derrière le passage.