Page 1 sur 1
Passage étroit entre 2 pelouse - AM308 puis AM320
Publié : ven. juil. 24, 2020 1:33 am
par jonas0_13
A proximité de la pelouse de 380 m2 tondue par mon AM308, j'ai une toute petite pelouse de 35 m2 (en bas à droite de la photo) ; les 2 sont reliées par un passage pavé de moins d'un mètre de large.

- passage_vers_pelouse_cave_photo_drone.jpg (229.08 Kio) Consulté 2784 fois
Au début je tondais la petite pelouse avec une thermique. C'est rapidement devenu pénible ; j'ai donc créé une zone secondaire pour la pelouse de 35 m2 ; déjà mieux, mais loin d'être parfait, car j'oublie régulièrement de porter le mouton dans le petit pré et... quand j'y pense, c'est que l'herbe est déjà nettement trop haute. Cette année, j'ai donc décidé de régler le problème définitivement. Je viens donc de faire une maquette de câblage permettant au robot d'emprunter le passage pavé.
Voici l'ancien câblage (je n'ai pas figuré le périphérique sur la zone secondaire) :

- passage_vers_pelouse_cave_avant.jpg (158.99 Kio) Consulté 2784 fois
et le nouveau câblage :

- passage_vers_pelouse_cave_apres.jpg (164.79 Kio) Consulté 2784 fois
et enfin un détail du passage pavé :
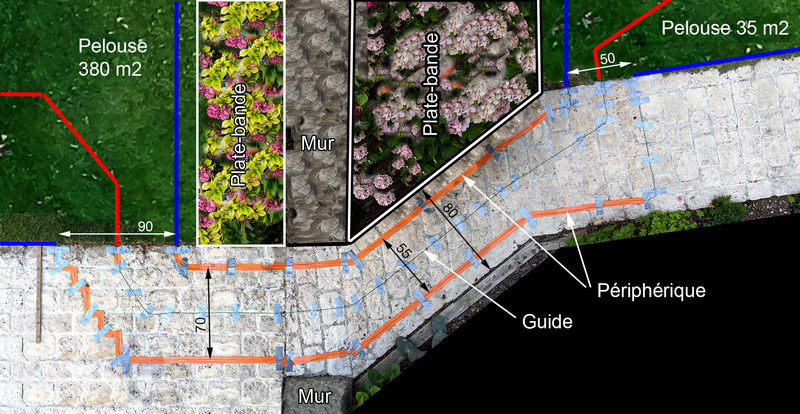
- passage_vers_pelouse_cave_zoom.jpg (154.75 Kio) Consulté 2784 fois
J'ai dû régler la largeur de couloir au minimum, car sinon le robot butait sur le périphérique à l'entrée du couloir et commençait à tondre sans entrer dans le couloir. C'est un inconvénient car le robot passe toujours au même endroit en suivant le guide ; il y a donc des traces très visibles. Je vais essayer de modifier le tracé du périphérique à l'entrée du couloir, pour voir s'il est possible de fonctionner avec la largeur moyenne du couloir (sur l'AM308 il n'y a que 3 largeurs possibles). Par ailleurs je n'ai pas encore mis de chicane (étranglement du périphérique) à l'entrée et à la sortie du couloir, mais je vais le faire, car le robot entre trop souvent dans le couloir accidentellement pendant la tonte (et perd pas mal de temps à essayer d'en sortir). Je ne sais cependant pas si ces étranglement du périphériques sont compatibles avec la largeur moyenne du couloir.
Je suis très preneur de conseils sur ces points.
Depuis 48 heures cela fonctionne sans problème (j'estime qu'il y a eu entre 15 et 20 sorties passant par le couloir). Le seul blocage qui s'est produit était dû à une marche trop haute (environ 3 cm et sol très meuble) entre le passage pavé et une plate-bande ; ce sera très facile à corriger.
J'ai fait une petite vidéo que je posterai ici dès qu'elle sera disponible.
Passage étroit entre 2 pelouse - AM308
Publié : ven. juil. 24, 2020 9:16 am
par Keops62
Superbe retour et expérience ! Merci.
Passage étroit entre 2 pelouse - AM308
Publié : ven. juil. 24, 2020 10:27 am
par Umbra55
[quote le 23/07/2020 à 23:33:54, jonas0_13 a dit :]Par ailleurs je n'ai pas encore mis de chicane (étranglement du périphérique) à l'entrée et à la sortie du couloir, mais je vais le faire, car le robot entre trop souvent dans le couloir accidentellement pendant la tonte (et perd pas mal de temps à essayer d'en sortir). Je ne sais cependant pas si ces étranglement du périphériques sont compatibles avec la largeur moyenne du couloir. [b]Je suis très preneur de conseils sur ces points.[/b][/quote]
Non, les étranglement du périphériques ne sont pas compatibles avec la largeur moyenne du couloir. En mettant des étranglements, il faudra penser à modifier le guide dans la petite pelouse : près de létranglement, le guide devra être perpendiculaire sur une plus longue distance afin que le capteur arrière passe également dans létranglement. Le grand problème des étranglements est que le robot passera quand même de temps en temps et y restera coincé. Cest particulièrement le cas dans la grande pelouse. Comme jai déjà dit dans un autre fil, la seule vraie solution cest le module de gestion des passages de Robonect .
Passage étroit entre 2 pelouse - AM308
Publié : ven. juil. 24, 2020 1:11 pm
par jonas0_13
Merci Keops : sympa

Merci beaucoup Umbra55 : je vais modifier en tenant compte de tes conseils. Et si j'ai trop de blocages dans le couloir j'investirai dans le module Robonect.
Une dernière question : pour la chicane, quelle est la distance minimum à respecter entre les 2 passages du périphérique ? AUtrement dit, si le "goulet" fait 10 cm de large, quelle est sa longueur minimale ?
Comme promis,
voici la vidéo.
Passage étroit entre 2 pelouse - AM308
Publié : ven. juil. 24, 2020 3:05 pm
par Umbra55
[quote le 24/07/2020 à 11:11:49, jonas0_13 a dit :]si le "goulet" fait 10 cm de large, quelle est sa longueur minimale ?[/quote] Tout dépend du paramètre "dépassement du fil". En standard il faut compter 30 cm. Il vaut mieux prévoir un peu de fil de réserve et éventuellement tester si on peut ramener les 10 cm à 6 cm. Dans ce cas, le guide doit être tiré parfaitement droit avant et après le goulot et parfaitement parallèle au goulet (p.e. exactement 3 cm de chaque côté du guide).
Passage étroit entre 2 pelouse - AM308
Publié : sam. juil. 25, 2020 3:17 am
par jonas0_13
Merci Umbra55. Je ferai un retour dès que j'aurai mis ne place et testé les "chicanes"
Passage étroit entre 2 pelouse - AM308
Publié : mer. sept. 02, 2020 12:23 pm
par jonas0_13
J'ai repris mes expériences avant d'encastrer les câbles dans les pavés du passage. Voici les conclusions auxquelles j'arrive pour un AM308 (*) :
- lorsque le robot suit le guide pour un départ distant, dès qu'il rencontre le périphérique il s'arrête et commence à tondre
- lorsque le robot suit le guide pour rejoindre la base, dès qu'il rencontre le périphérique il s'arrête, puis repart en recherche du guide. Si cela se produit derrière un passage étroit, le robot épuise sa batterie sans jamais réussir à revenir à la base.
==> Cela impose de régler le couloir sur « étroit » sur l'AM308.
- essayer de faire un entonnoir avec le périphérique ne sert à rien. Dès que le robot détecte le périphérique, que ce soit frontalement ou avec un angle très "couché", il quitte le guide.
- la longueur du goulet (rétrécissement du périphérique) destiné à empêcher le robot de pénétrer dans le couloir pendant la tonte peut être nettement inférieure à 30 cm. J'ai obtenu un fonctionnement très fiable avec seulement 10 cm (partie droite du schéma) :
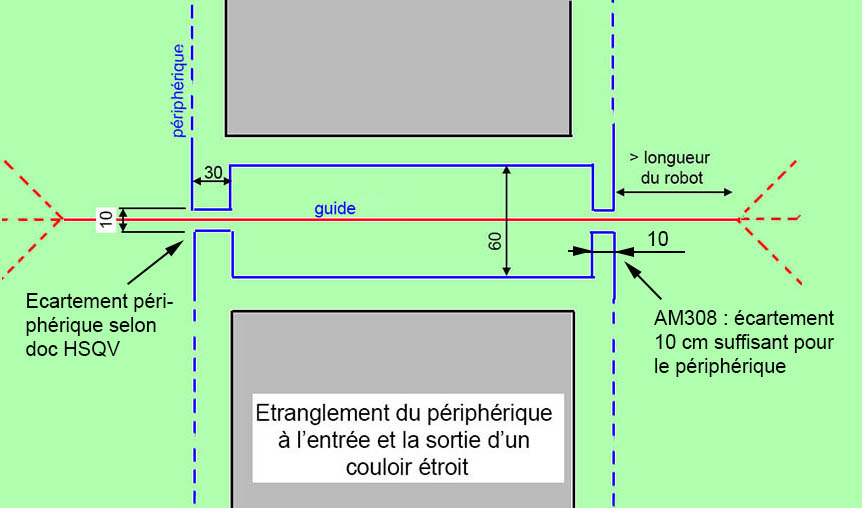
- schema_etranglement_peripherique_couloir_etroit.jpg (76.19 Kio) Consulté 2784 fois
(*) qui n'est pas doté de la fonction "Détection auto des passages ". Les conclusions ne s'appliquent donc pas entièrement aux modèles qui comportent cette fonction
Re: Passage étroit entre 2 pelouse - AM308
Publié : sam. sept. 03, 2022 4:42 pm
par jonas0_13
Ayant eu l'opportunité d'acheter un 330X qui remplace mon 320, j'ai pu mettre le 320 à la place du 308. Cela permet de corriger 2 défauts de l'installation :
- le 320 dispose de la fonction "détection automatique des passages" qui permet de régler une largeur de couloir plus grande et donc de supprimer les traces
- le 320 permet de régler la fréquence de tonte de la petite partie à 10% environ (proportionnellement à la surface), ce que le 308 ne permettait pas.
L'installation fonctionne ainsi depuis le début de la saison 2022 ; le résultat est très satisfaisant (bien mieux qu'avec le 308). Reste un seul problème : de temps en temps (trop souvent en fait), le robot entre dans le couloir pendant la tonte, malgré des étranglement de 10 cm à l'entrée et à la sortie. Je prévois de corriger cela en créant une barrière virtuelle avec le module Robonect et un Robonect Relay. C'est le programme de l'hiver pour la saison 2023.
L'installation étant maintenant au point j'ai pu encastré les câbles dans le dallage. Les périphériques sont encastrés dans les joints entre les pavés, car les angles à 90° ne sont pas gênants. Par contre j'ai dû creuser une saignée à la disqueuse pour le guide qui ne supporte pas ces angles (son tracé doit être au contraire très lisse) :

- passage_vers_pelouse_cave_avec saignées-00.jpg (168.4 Kio) Consulté 2602 fois
Les joints où passe les câbles sont encore assez visibles car le mortier blanc n'a pas encore pris la patine du mortier d'origine. Par contre les saignées faites dans les pavé, rebouchées avec du mortier de la même couleur que les pavés, sont presque invisibles :

- passage_vers_pelouse_cave_avec saignées-03.jpg (390.42 Kio) Consulté 2602 fois
Re: Passage étroit entre 2 pelouse - AM308
Publié : ven. avr. 07, 2023 4:17 pm
par MerlinX
jonas0_13 a écrit : ↑sam. sept. 03, 2022 4:42 pm
Ayant eu l'opportunité d'acheter un 330X qui remplace mon 320, j'ai pu mettre le 320 à la place du 308. Cela permet de corriger 2 défauts de l'installation :
- le 320 dispose de la fonction "détection automatique des passages" qui permet de régler une largeur de couloir plus grande et donc de supprimer les traces
Du coup, aujourd'hui avec le recul, quel est l'efficacité des goulots d'étranglement avec un 320 ?
Est-ce qu'en mode tonte il s'engouffre quand même dans le couloir ?
Est-ce qu'en mode recherche ou retour il passe à 100% ?
Re: Passage étroit entre 2 pelouse - AM308
Publié : sam. avr. 08, 2023 2:54 pm
par jonas0_13
En pratique, l'efficacité est imparfaite mais suffisante !
Le robot s'engouffre de temps en temps dans le passage pendant la tonte et il tourne comme un mouton en cage pendant un certain temps. Ce qui m'étonne cependant c'est qu'il réussit en général à ressortir assez rapidement ; en tous cas il n'est jamais arrivé qu'il reste bloqué dans le couloir jusqu'à épuisement de la batterie.
Donc en pratique ça marche très bien comme cela. Hélas, je suis un peu perfectionniste, j'ai donc malgré tout le projet d'améliorer le fonctionnement grâce au module Robonect (qui est déjà installé sur mon 320) ; il me manque juste un peu de temps pour le faire ... cet été peut-être ?
